| 6.5. RGB Noise | ||
|---|---|---|
 |
6. Noise Filters |  |
| 6.5. RGB Noise | ||
|---|---|---|
| |
6. Noise Filters | |
The RGB Noise filter adds a normally distributed noise to a layer or a selection. It uses the RGB color model to produce the noise (noise is added to red, green and blue values of each pixel). A normal distribution means, that only slight noise is added to the most pixels in the affected area, while less pixels are affected by more extreme values. (If you apply this filter to an image filled with a solid grey color and then look at its histogram, you will see a classic bell-shaped Gaussian curve.)
The result is very naturally looking noise.
This filter does not work with indexed images.
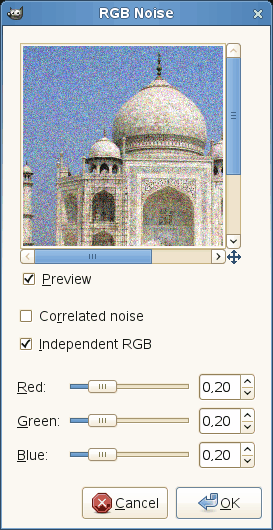
This preview displays interactively changes before they are applied to the image.
Noise may be additive (uncorrelated) or multiplicative (correlated - also known as speckle noise). When checked, every channel value is multiplied by an normally distributed value. So the noise depends on the channel values: a greater channel value leads to more noise, while dark colors (small values) tend to remain dark.
When this radio button is checked, you can move each RGB slider separately. Otherwise, sliders R, G and B will be moved all together. The same relative noise will then be added to all channels in each pixel, so the hue of pixels does not change much.
These slidebars and adjacent input boxes allow to set noise level (0.00 - 1.00) in each channel. Alpha channel is only present if your layer holds such a channel. In case of a grayscale image, a Grey is shown instead of color sliders.
The value set by these sliders actually determine the standard deviation of the normal distribution of applied noise. The used standard deviation is a half of the set value (where 1 is the distance between the lowest and highest possible value in a channel).