| 5. Filtry detekce hran | ||
|---|---|---|
 |
Kapitola 14. Filtry |  |
| 5. Filtry detekce hran | ||
|---|---|---|
| |
Kapitola 14. Filtry | |
Filtry detekce hran hledají v obrázku hranice mezi jednotlivými barvami, tedy obrysy grafických prvků, ze kterých se obrázek skládá.
Hodí se při tvorbě výběrů a k různým uměleckým záměrům.
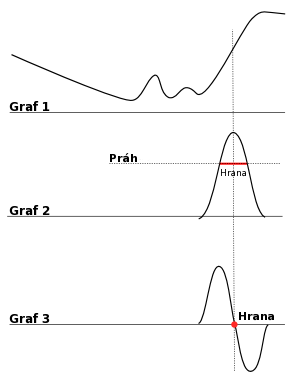
Většina metod detekce hran je založena na metodách výpočtu gradientu a tvoří silné hraniční linie. Podívejte se na graf 1, který vyjadřuje změny v intenzitě barev. Vlevo je pozvolný gradient, který hranu netvoří. Vpravo je ostrý přechod, který hranu tvoří. Nyní spočítejme gradient, rychlost změny na této hraně, čili první derivaci (graf 2). Je nutno rozhodnou o velikosti prahu, který musí gradient přesáhnout, aby byla nalezena hrana (přesná hrana je na vrcholu křivky). Ve většině případů je práh pod vrcholem a hrana je silná.
Laplaceova metoda hledání hran používá druhou derivaci (graf 3). Hledaná část křivky protíná nulovou hodnotu a je tedy jasně definovaná. Proto Lapalceova metoda vede k tenkým jednopixelovým hranám. Druhá derivace však také nabývá nulových hodnot na mnoha místech, kde dochází k malým nepravidelnostem, výsledkem jsou falešné hrany.
Vzniku falešných hran lze zabránit mírným rozostřením obrázku před použitím Laplaceova filtru. Drobné nepravidelnosti se rozostří, a tak se zabrání vzniku falešných hran.

